

The ocean abyss is Earth’s last great frontier, a place of immense mystery and scale. More people have journeyed to space than have visited the deepest parts of our oceans, like the Mariana Trench. This vast, dark realm presents extreme environmental challenges, yet humanity’s drive to explore pushes us to understand it better. (Learn more about deep-sea exploration efforts).
How do we venture into a world with crushing pressure, freezing temperatures, and total darkness? Cutting-edge technology is the key, making entry into this hostile domain possible. This technology helps us uncover the secrets of deep-sea life, geology, and its potential resources. We will look at the vehicles that take us there, the power systems that keep them running, the sensors that let us see and gather data, the challenges of communicating underwater, and the materials built to withstand the extreme conditions. Finally, we’ll glance at the future of deep-sea tech.
Why the Deep Sea is a Technological Frontier
Exploring the deep ocean is incredibly difficult. The environment itself is the primary barrier, pushing the limits of engineering and design.
Extreme Pressure & Temperature
The most significant challenge is hydrostatic pressure. It increases dramatically with depth, reaching over 1,100 times atmospheric pressure at the bottom of the Mariana Trench. This is like having the weight of 50 jumbo jets pressing down on you. Temperatures near the seafloor are typically just above freezing (around 2-4°C), except near hydrothermal vents.
These extreme conditions severely affect materials, requiring structures strong enough not to collapse. Electronic components must be housed in pressure-resistant enclosures or designed to operate at high pressures. Buoyancy is tricky; objects become less buoyant as materials compress. These factors make designing vehicles and equipment uniquely complex.
Darkness and Visibility Challenges
Sunlight penetrates only the uppermost layer of the ocean, the euphotic zone, which usually extends down about 200 meters. Below this, it is completely dark. While artificial lights can be used, their effectiveness is limited.
Particles suspended in the water scatter and absorb light quickly. This reduces visibility and the range of cameras, making it difficult to observe the environment over large areas or capture high-quality images without being very close.
Distance and Communication Hurdles
Deep-sea operations often occur thousands of meters below the surface and far from land support. Communication back to the surface ship or shore is problematic.
Unlike air, water quickly absorbs and attenuates radio waves, including those used for GPS, Wi-Fi, and cellular signals. This makes standard wireless communication methods ineffective for significant depths or distances.
The Vehicles of the Abyss
Diverse vehicles are needed to operate in the deep sea, each designed for specific tasks and depth ranges.
Manned Submersibles: Pioneers of Depth
Manned submersibles were among the first vehicles to reach the deepest parts of the ocean. Early examples include the Bathyscaphe Trieste, which descended into the Mariana Trench in 1960. Modern submersibles like the US’s Alvin or Japan’s Shinkai 6500 allow scientists to observe and work directly.
These vehicles feature extremely strong pressure hulls, often spherical to distribute stress. Life support systems provide breathable air and control temperature for the typically small crew (usually 2-3 people). Ballast systems control descent and ascent. However, they are costly to operate, have limited space, short endurance, and are depth-limited by their pressure hull design.
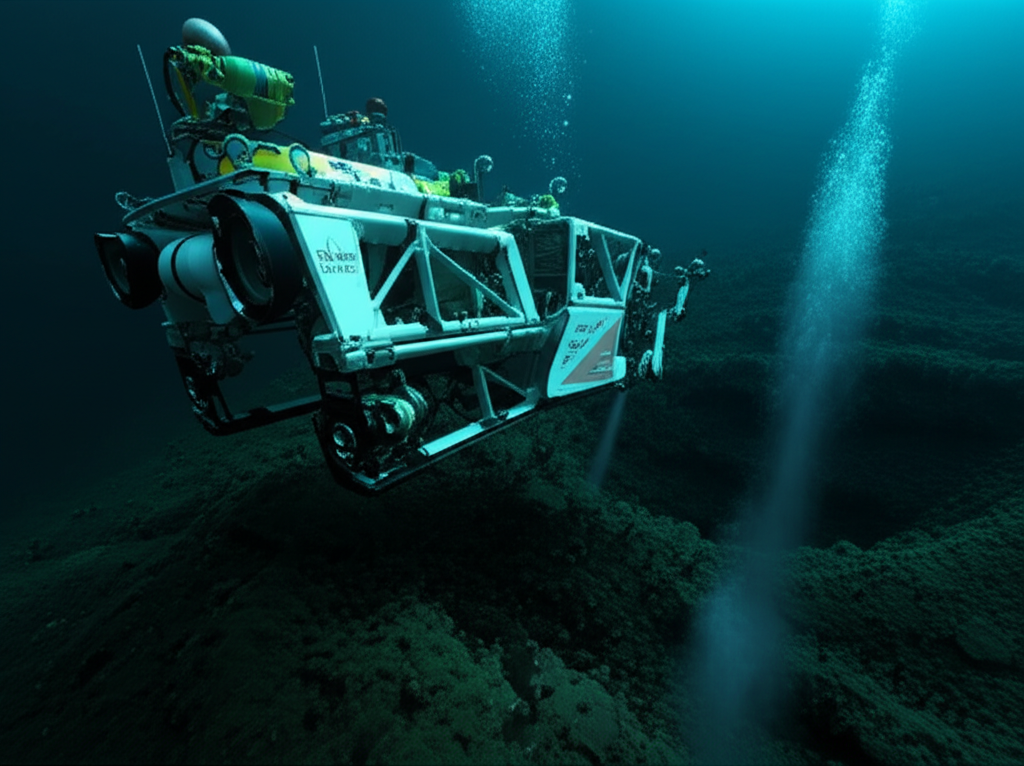
ROVs: The Remote Hands and Eyes
Remotely Operated Vehicles (ROVs) are unmanned robots controlled from a surface ship via a tether. A major advantage is that they eliminate the risk to human life in hazardous environments. They can also operate for longer durations than manned submersibles, limited primarily by the surface ship’s endurance.
ROVs are built with robust frames, powerful thrusters for maneuverability, and sophisticated systems. These include high-definition cameras, bright LED lights, and often robotic arms (manipulators) for collecting samples or performing tasks. They also carry various sensors. The tether is crucial, providing power and high-bandwidth communication, but managing its drag and preventing entanglement is a significant challenge.
AUVs: Autonomous Explorers
Autonomous Underwater Vehicles (AUVs) operate independently without a tether, following pre-programmed missions. Their untethered nature allows them to cover vast areas efficiently and operate stealthily.
Core technologies include mission planning software, energy-dense batteries for power, and advanced navigation systems like Inertial Navigation Systems (INS) combined with Doppler Velocity Logs (DVLs) and acoustic positioning. They also have onboard data processing capabilities. AUVs are used for large-scale mapping (bathymetry), environmental monitoring, inspection of underwater infrastructure, and search operations.
Here is a comparison of the main deep-sea vehicle types:
| Feature | Manned Submersible | ROV | AUV |
|---|---|---|---|
| Human Onboard | Yes | No | No |
| Tethered | No (usually) | Yes | No |
| Risk to Humans | Direct | Minimal (on surface ship) | Minimal |
| Endurance | Limited (life support) | Ship-dependent | Battery-dependent |
| Typical Use | Direct observation, sampling | Manipulation, inspection | Mapping, surveys, monitoring |
Powering the Deep: Energy Solutions
Providing reliable energy to vehicles and sensors in remote, high-pressure deep-sea environments is a critical challenge. Systems must be compact, powerful, and able to operate in harsh conditions.
Batteries and Fuel Cells
Batteries are the primary power source for untethered vehicles like AUVs and most manned submersibles. They must offer high energy density to provide sufficient range and operational time.
Advances in Lithium-ion battery technology have significantly improved endurance. However, operating batteries under high pressure and extreme temperatures adds complexity, requiring specialized housings and thermal management. Fuel cells offer the potential for even longer mission durations for future systems.
Nuclear Power in Submarines
While not used for typical scientific submersibles or ROVs, large research and military submarines often employ nuclear reactors. These provide virtually unlimited power and allow the vessel to generate its own oxygen, enabling missions lasting months without needing to surface.
This technology allows these submarines to operate globally and conduct extensive underwater surveillance or research over vast distances and long periods.
Harvesting Energy from the Environment
For future or very long-duration deployments, concepts for harvesting energy from the deep-sea environment are being explored. This could involve using thermal gradients near hydrothermal vents, capturing energy from ocean currents, or even converting acoustic energy.
These methods are currently niche and often limited to low-power applications like seafloor sensor nodes, but they hold promise for enabling persistent presence in the deep ocean without frequent battery changes or recovery.
Seeing and Sensing in the Dark
Gathering data and understanding the deep-sea environment requires technologies that can overcome the complete lack of natural light. Specialized sensors and imaging systems are essential tools for exploration and research.
Advanced Camera Systems & Lighting
Visual observation relies on cameras paired with powerful artificial lights. Specialized low-light cameras using sensitive CCD or CMOS sensors are used. High-intensity LED lighting systems are designed to withstand immense pressure.
A major challenge is minimizing backscatter – light reflecting off particles in the water, which can obscure images. Careful lighting placement and processing techniques help. Stereo camera systems can capture multiple images to create 3D reconstructions or perform photogrammetry of the seafloor and objects.
Sonar and Acoustic Imaging
Since light doesn’t travel well, sound is the primary method for navigating and mapping. Sonar (Sound Navigation and Ranging) uses sound pulses to detect objects, measure distances, and map the seafloor.
Different types of sonar provide various data: Side-scan sonar creates detailed images of seafloor texture and features. Multi-beam echo sounders map the seafloor depth and shape (bathymetry). Sub-bottom profilers use lower frequencies to penetrate sediment layers and reveal geological structures beneath the seafloor. Acoustic data is processed to generate complex 3D maps and images.
Chemical and Environmental Sensors
To understand the unique deep-sea ecosystems and oceanographic processes, a wide array of chemical and environmental sensors are used. These include instruments to measure Conductivity, Temperature, and Depth (CTD sensors)).
Other sensors measure parameters like dissolved oxygen, pH, Eh (redox potential), methane, dissolved CO2, and nutrient concentrations. These are vital for studying life around features like hydrothermal vents or cold seeps, monitoring pollution, and understanding the ocean’s role in climate change and carbon cycles.
Communication in the Deep
Establishing reliable communication through water is inherently difficult due to the rapid attenuation of radio waves. This poses a significant challenge for controlling vehicles and transmitting data back to the surface.
Acoustic Communication Limitations
Sound waves are the main method for underwater communication over distances. However, acoustic communication has significant limitations. It offers very low bandwidth, meaning data is transferred slowly (often only a few thousand bits per second, compared to millions or billions for Wi-Fi or fiber optics).
Acoustic signals also suffer from high latency (delay), noise interference, and multipath distortion (signals bouncing off the seafloor or surface). Acoustic modems are used for command and control or transmitting small packets of data, but sending large volumes of sensor data or video is impractical.
Optical Communication (Short Range)
For short distances and line-of-sight applications, blue-green light lasers or LEDs can provide higher bandwidth communication than acoustics. This is useful for transmitting data between a vehicle and a seafloor docking station or between vehicles operating closely.
However, even blue-green light is absorbed and scattered by water over relatively short distances (tens to a few hundred meters). This limits optical communication to specialized close-range data transfer tasks.
Tethered Communication
ROVs rely on physical tethers, often containing fiber optic cables. These tethers provide highly reliable, high-bandwidth communication (potentially gigabits per second), allowing for real-time control and transmission of high-definition video and large data sets.
While tethers solve the communication problem, they create significant operational challenges. They are heavy, create drag, can easily become entangled on obstacles, and require complex handling systems on the surface ship. This limits the ROV’s range and maneuverability.
Materials Science: Building for Pressure
Creating structures and components that can withstand the crushing pressure of the deep sea is fundamentally a materials science challenge. Materials must be strong, resistant to corrosion, and in some cases, lightweight to aid buoyancy.
Titanium and High-Strength Alloys
Titanium and high-strength steel alloys are crucial for deep-sea vehicles. They offer exceptional strength-to-weight ratios, meaning they are very strong without being excessively heavy. This is vital for pressure hulls and structural frames.
Titanium is also highly resistant to corrosion in saltwater, which is a major problem for many other metals. Its non-magnetic properties can also be advantageous for certain scientific measurements. Pressure hulls, especially spherical ones (which distribute stress most efficiently), are often made from thick sections of these advanced materials.
Ceramics and Composites
Other materials play supporting roles. Strong glasses or ceramics are used for viewports or specialized sensor housings that need to be transparent while resisting pressure. Composite materials, particularly syntactic foam, are essential for buoyancy at depth.
Syntactic foam is made of microscopic glass or ceramic spheres embedded in a resin. It is designed to be less compressible than water, providing buoyancy even under immense pressure. Designing reliable seals and joints between different materials or hull sections that won’t leak under millions of Pascals of pressure is a complex engineering feat.
Designing Pressure Hulls
The design of pressure hulls is based on fundamental engineering principles. Spherical shapes are ideal because the pressure is distributed evenly across the surface. Cylindrical hulls are also used but require stronger reinforcement and end caps.
Engineers must balance the required depth rating (which dictates material thickness and strength) with the resulting weight (affecting buoyancy) and the internal volume available for occupants or equipment. Every penetration through the hull (for cables, viewports, hatches) represents a critical potential failure point that must be engineered with extreme precision.
Future of Deep-Sea Technology
The field of deep-sea technology is constantly evolving, driven by the desire to explore more efficiently, cost-effectively, and cover larger areas of the ocean.
Miniaturization and Swarms
A significant trend is the miniaturization of deep-sea technology. Smaller, lighter, and more energy-efficient components are enabling the development of smaller, cheaper vehicles.
This opens up possibilities for deploying swarms of autonomous robots. These collaborative groups could work together to map large areas quickly, perform coordinated sensing tasks, or investigate specific sites from multiple angles simultaneously, covering ground far more efficiently than single large vehicles.
AI and Machine Learning for Data Analysis
Modern sensors collect vast amounts of data – terabytes of visual, acoustic, and environmental information from a single mission. Analyzing this data manually is a bottleneck.
Artificial intelligence (AI) and machine learning are becoming essential tools. AI can automate the detection and classification of objects (like marine life or geological features), identify anomalies, and help researchers extract meaningful insights from complex datasets. AI is also being integrated into AUVs to enable more sophisticated autonomous decision-making and adaptive mission planning based on real-time sensor inputs.
Long-Duration Missions and Habitats
Enabling longer missions is a key focus. Concepts include seafloor docking stations where AUVs can recharge batteries and offload data without needing to return to the surface ship. Exploring environmental energy harvesting methods could also contribute to persistent presence.
While perhaps further off, designs for semi-permanent human or robotic habitats on the seafloor could allow for extended research periods directly in the deep-sea environment, transforming our approach to long-term studies.
Potential Applications: Mining, Research, Conservation
Advanced deep-sea technology has diverse applications. Interest in deep-sea mining for minerals like cobalt, nickel, and rare earth elements is growing, though it raises significant environmental concerns and controversy.
Critically, this technology is indispensable for fundamental scientific research – discovering new species, studying plate tectonics, understanding the ocean’s role in regulating climate. It is also vital for monitoring the deep ocean for environmental changes, assessing the impact of human activities, and facilitating conservation efforts to protect these vulnerable ecosystems.
Conclusion
Venturing into the ocean’s abyss demands extraordinary technological prowess. It requires incredible feats of engineering to build vehicles that withstand crushing pressure, sophisticated power systems for remote operation, advanced sensors to perceive in absolute darkness, and ingenious methods for communication through water. Specialized materials science is fundamental to creating structures that survive these conditions.
Continued technological advancement is crucial for expanding our understanding of Earth’s largest and least-explored biome. The deep sea plays a vital role in global climate regulation, hosts unique ecosystems adapted to extreme conditions, and holds clues about our planet’s geological history. Its potential resources are also of increasing interest.
Despite our progress, over 95% of the ocean remains unexplored. Technology is not just a tool for exploration; it is the indispensable key that will continue to unlock the secrets of the deep, allowing us to push the frontiers of knowledge and work towards managing and protecting this critical part of our planet.
FAQ
Q1: Why can’t we use regular submarines for deep-sea exploration?
A1: Most military or civilian submarines are designed to operate in shallower waters (hundreds of meters). Their hulls are not built to withstand the extreme pressures found at depths of several kilometers in the abyss. Deep-sea submersibles or bathyscaphes have specially designed, much stronger pressure hulls made of very thick, high-strength materials like titanium.
Q2: How do deep-sea vehicles navigate without GPS?
A2: GPS signals cannot penetrate water. Deep-sea vehicles use a combination of technologies. These include Inertial Navigation Systems (INS) which track movement from a known starting point, Doppler Velocity Logs (DVLs) that measure speed relative to the seafloor using acoustics, and acoustic positioning systems that use sound signals exchanged with surface ships or seafloor transponders to determine location.
Q3: What is the biggest challenge for deep-sea ROVs?
A3: While many challenges exist, managing the tether is a major hurdle for ROVs. The heavy, bulky cable creates drag, limits maneuverability and range from the surface ship, and is vulnerable to getting snagged or damaged on seafloor obstacles like rocks or shipwrecks.
Q4: How do scientists collect samples from the deep seafloor?
A4: Manned submersibles and ROVs are equipped with robotic manipulator arms capable of grasping rocks, biological specimens, or deploying sampling tools like scoops or corers. AUVs can also sometimes carry sampling equipment, but their capabilities are generally less precise than controlled ROV arms.
Q5: Is deep-sea mining happening now?
A5: As of late 2023/early 2024, commercial-scale deep-sea mining is not widespread, but significant interest exists, particularly in exploiting mineral-rich nodules, crusts, and seafloor massive sulfides. Several companies are developing technology and seeking permits. The practice is highly controversial due to concerns about potentially irreversible environmental damage to fragile deep-sea ecosystems.